PDF Index
PDF Index| SDT-piezo
Contents
Functions
PDF Index |
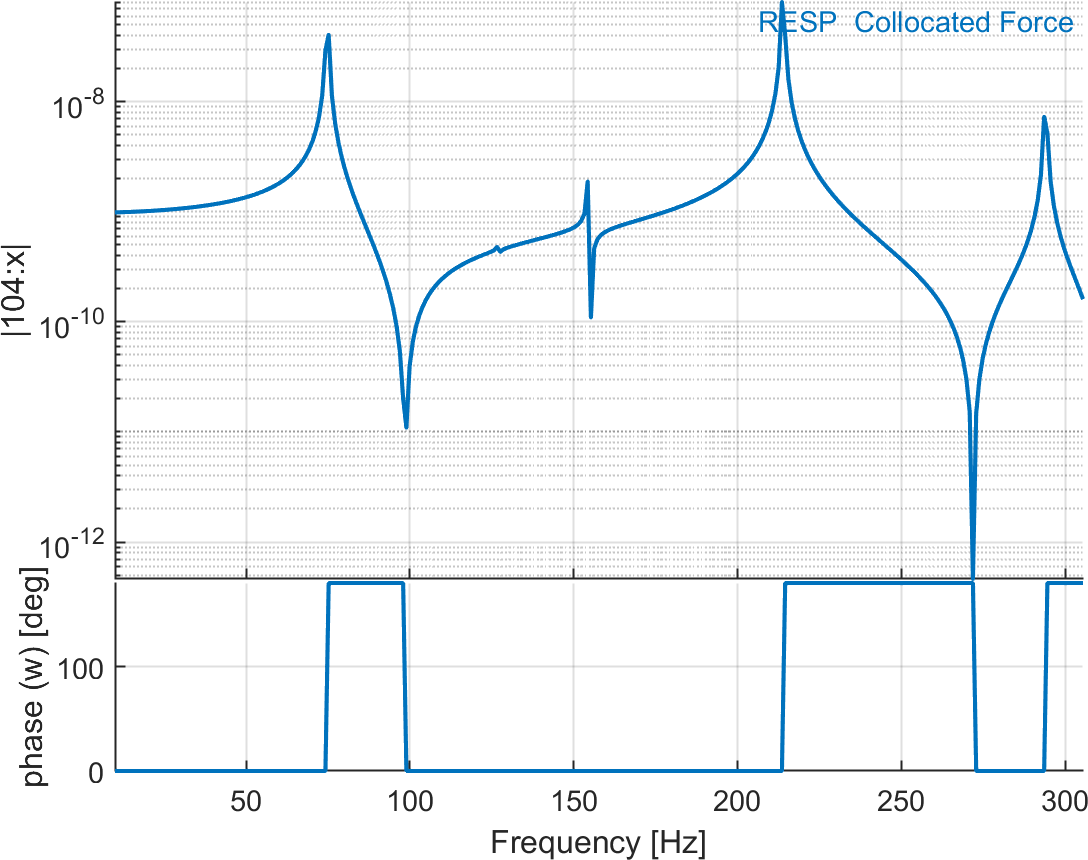
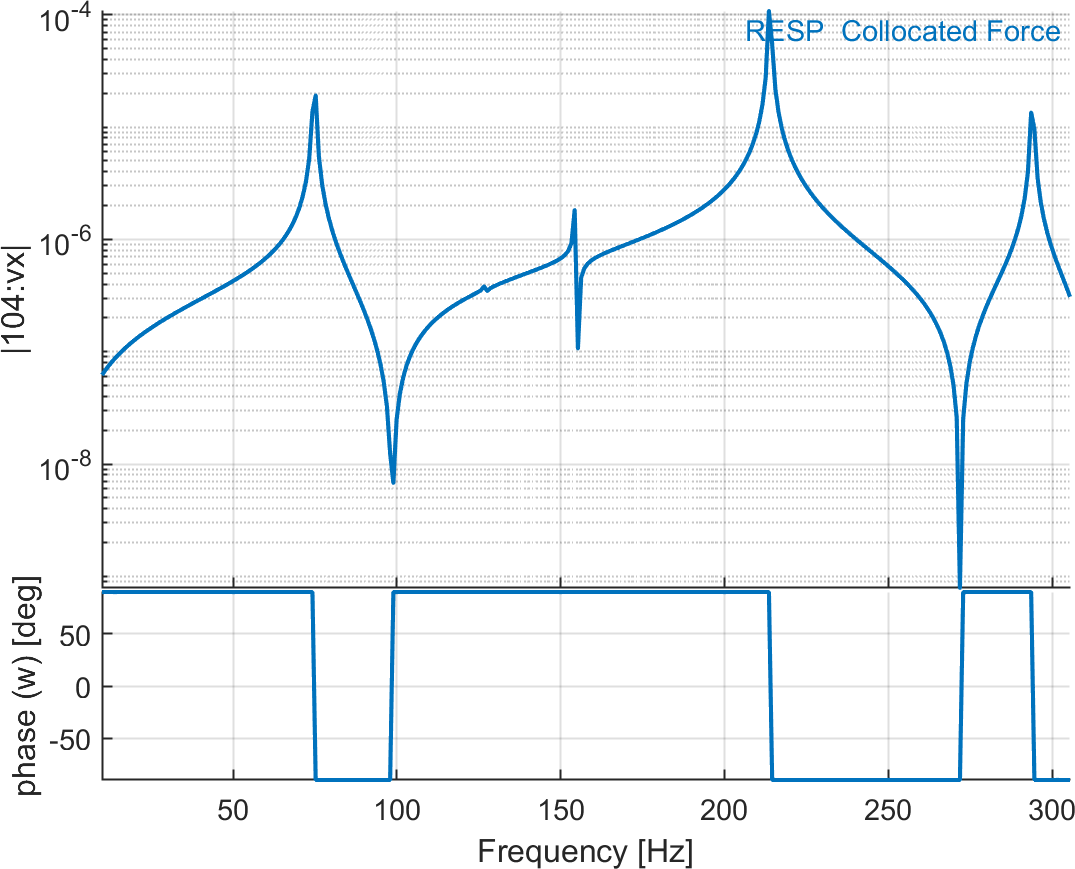
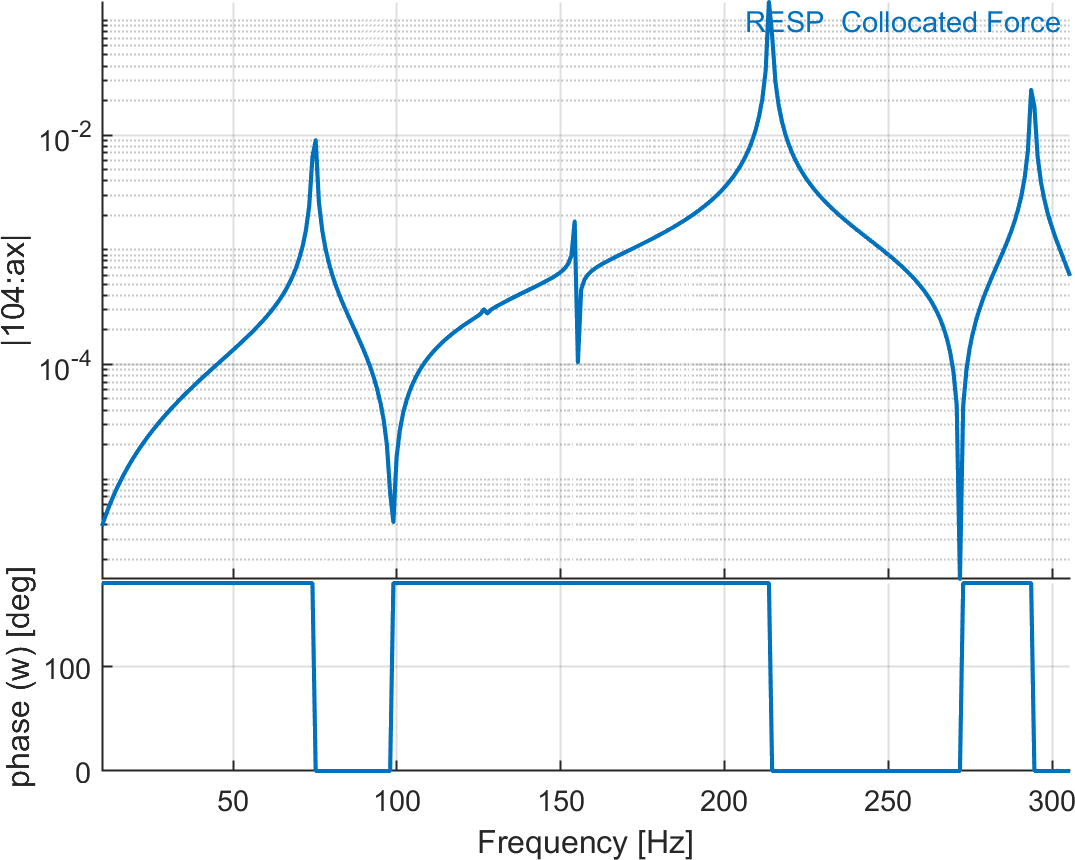
For point sensors, velocity and acceleration sensors can also be defined. The short script below introduces a collocated sensor actuator pair on node 104 in direction x for the U-beam. The sensor is either a displacement, velocity or acceleration sensor, and the resulting collocated FRFs are plotted in Figure 4.18.
 d_piezo('TutoPzBeamDispVelAcc-s1')
allows to build the mesh, apply the boundary conditions, and compute the mode shapes.
d_piezo('TutoPzBeamDispVelAcc-s1')
allows to build the mesh, apply the boundary conditions, and compute the mode shapes.
Then in d_piezo('TutoPzBeamDispVelAcc-s2')
, a displacement, velocity and acceleration sensor is defined at not 104 in direction x, and a collocated force is introduced.
%% Step 2 : Introduce a point displ/vel/acc sensor and collocated force model = fe_case(model,'SensDOF','Sensors',{'104:x';'104:vx';'104:ax'}); model=fe_case(model,'DofLoad SensDof','Collocated Force','Sensors:1'); % 1 for first sensor if there are multiple
In d_piezo('TutoPzBeamDispVelAcc-s3')
), the transfer function is computed for the three sensors and represented in Figure 4.18.
Other types of sensors are also defined in SDT using fe_case('Sens...') calls. They are detailed in the general SDT manual and are of the following type:
Refer to SDT general documentation for examples of definition of such transducers. SDT also provides advanced tools to define sensors which are not at the location of nodes in the finite element models. For more details, see the documentation of the base/fe_sens.html function.
In addition, piezoelectric sensors are discussed in the next section (section 4.6).